
Automated Guided Vehicles' Traffic Control Software Advances Value Proposition of Mobile Robots
by Rob Sullivan | October, 2018

Automation, Control & Plant Intelligence - Articles, Analysis, Reviews, Interviews & Views
by Rob Sullivan | October, 2018
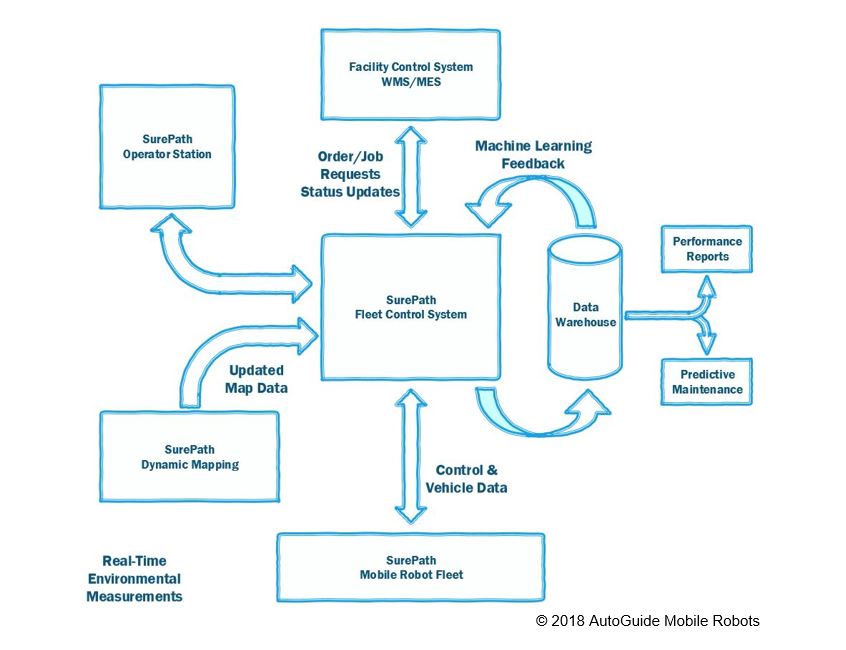 Far more dynamic than merely a traffic controller, the Fleet Control System maintains real-time communications with each vehicle. It monitors all vehicle diagnostic information and is responsible for optimum work assignment and traffic routing. Many Fleet Control Systems can easily import CAD or other image files of facility layouts to assist users with spatial relationships presented in on-screen views. With "real-time" AGV status displayed using dynamic color changes, users can hover over an icon representing an individual vehicle to view AGV information and location, or drill into currently executing work details.
Detailed system performance information is saved in data warehouses for data mining, allowing users to define metrics and create custom reports. Users can view and print these reports or track historical trends to evaluate the impact of process optimizations. When data from the vehicle sensors and operations are collected, the machine provides deeper insights, so operations managers can optimize system performance.
An open system architecture gives customers ultimate flexibility. Even home-grown system elements can be integrated with these systems, regardless of manufacturer or vendor. This versatility makes the fleet control software easy-to-integrate with existing infrastructure.
As an example, mobile robot systems can be employed to replace existing manual transport between work cells, as is typical in a manufacturing environment. With the installation of simple remote call buttons, the fleet control system monitors the incoming request and optimizes vehicle selection and routing. While en route, the FCS can dynamically switch vehicle assignments, alter the path around local objects, or change the overall route to avoid traffic congestion and improve performance.
The flexibility and easy integration of AGVs with a Fleet Control System, coupled with a minimally invasive installation, mobile robot systems can provide a rapid return on investment and become a substantial contributor to reduced operating expenses.
Rob Sullivan, AutoGuide Mobile Robots' President and CEO is a proven robotics and automation leader with a solid track record of pioneering innovative products. With over thirty years of career advancement in high technology companies ranging from burgeoning start-ups to established multinational corporations, he offers a rare combination of business leadership and engineering expertise that resulted in
.......
See More Details.
Far more dynamic than merely a traffic controller, the Fleet Control System maintains real-time communications with each vehicle. It monitors all vehicle diagnostic information and is responsible for optimum work assignment and traffic routing. Many Fleet Control Systems can easily import CAD or other image files of facility layouts to assist users with spatial relationships presented in on-screen views. With "real-time" AGV status displayed using dynamic color changes, users can hover over an icon representing an individual vehicle to view AGV information and location, or drill into currently executing work details.
Detailed system performance information is saved in data warehouses for data mining, allowing users to define metrics and create custom reports. Users can view and print these reports or track historical trends to evaluate the impact of process optimizations. When data from the vehicle sensors and operations are collected, the machine provides deeper insights, so operations managers can optimize system performance.
An open system architecture gives customers ultimate flexibility. Even home-grown system elements can be integrated with these systems, regardless of manufacturer or vendor. This versatility makes the fleet control software easy-to-integrate with existing infrastructure.
As an example, mobile robot systems can be employed to replace existing manual transport between work cells, as is typical in a manufacturing environment. With the installation of simple remote call buttons, the fleet control system monitors the incoming request and optimizes vehicle selection and routing. While en route, the FCS can dynamically switch vehicle assignments, alter the path around local objects, or change the overall route to avoid traffic congestion and improve performance.
The flexibility and easy integration of AGVs with a Fleet Control System, coupled with a minimally invasive installation, mobile robot systems can provide a rapid return on investment and become a substantial contributor to reduced operating expenses.
Rob Sullivan, AutoGuide Mobile Robots' President and CEO is a proven robotics and automation leader with a solid track record of pioneering innovative products. With over thirty years of career advancement in high technology companies ranging from burgeoning start-ups to established multinational corporations, he offers a rare combination of business leadership and engineering expertise that resulted in
.......
See More Details.
YOU MAY LIKE:
Popular Articles
Manufacturing Insights